EXPERIENCE
✓ Certified Linux Professional (Red Hat, Debian, Ubuntu)
✓ Programming and development (Python, HTML, PHP, MySql...etc)
✓ Ai & Automation (Machine learning, Generative Ai)
✓ AWS systems engineering, Systems architecture
✓ Web design and development
✓ Operation systems and scripting (GNU/Linux, Windows)
✓ Certified hardware support for HP and Lenovo
✓ Certified systems engineer HP & Lenovo
✓ Windows and Linux desktop and server deployment & administration
✓ IT Security, proxy filtering, firewall and backup solutions
✓ System deployment for businesses(Windows and Linux based)
✓ Cloud computing and Virtualization solutions
✓ Robotics, IoT, PIC, Microcontrollers, Automation, Raspberry Pi / Linux, AI teaming
✓ Cross platform migrations between Microsoft Windows and Linux OS's
Multiple robots collaborating on single or multiple tasks (Robotics & Ai)
- Autonomous AI Robotics Innovations to utilize the power of AI in real life scenarios -
Exploring the frontier of autonomous robotics, with a focus on seamless communication and coordination between multiple robots—enabling them to work together intelligently, efficiently, and adaptively.
My interest covers :
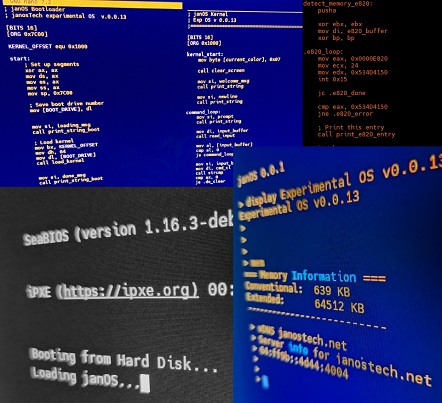
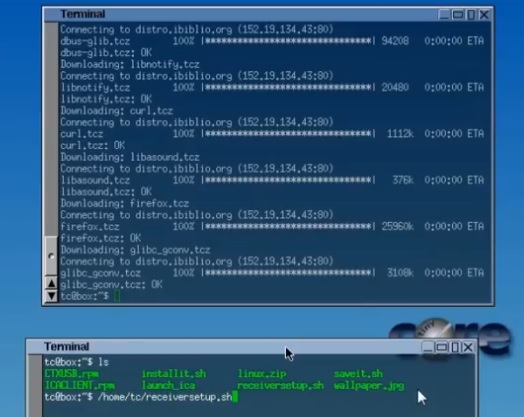
Linux from scratch
Assembly development, boot, kernel, low level programming
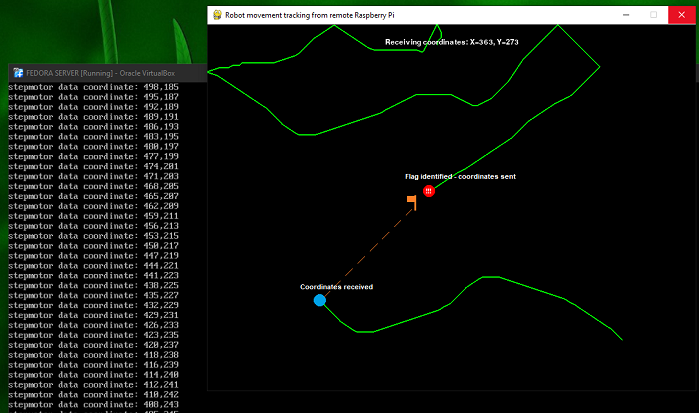
Research and development Autonomous AI-controlled robotics systems capable of working together to achieve simple and complex tasks.
My focus is on hands-on experimentation in the physical world to fully harness the potential of AI. By using simple yet highly practical platforms like the Raspberry Pi-powered PiCar-X, we can create a powerful foundation for developing and researching various aspects of Ai robotics, like swarms of autonomous robots capable of searching for and identifying objects. This approach enables us to push AI’s capabilities into real-world applications across a vast range of tasks.
Locating and communicating targets between themselves, utilizing navigation technologies / LiDAR and advanced pathfinding algorithms.
Beyond ground robotics, engineering drone and land robot collaborations, where autonomous aerial and ground units locate, track, recover, or identify targets—demonstrating seamless multi-agent coordination and real-world problem-solving.



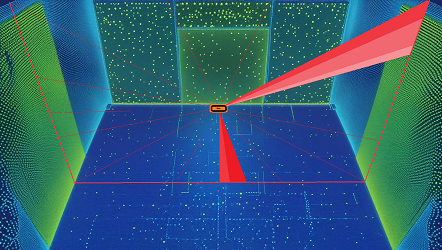
"Prometheus" style mapping ? Fun "little" LIDRBee project
Centered flight path, ultrafast reactive control for positioning, relying on depth analisys provided by LiDAR and ultrasonic distance scanners. (>=10hz)
Rapid (lo-res) forward-facing scan using the drone’s onboard sensors (LiDAR, ultrasonic rangefinders, and optical cameras) to map the immediate environment ahead. Detect and classify any obstacles within the environment, and evaluate the presence, orientation, and safety of immediate potential flyable paths for continued navigation.
Obstacle avoidance layer / algorithm that reacts immediately to proximity data. Positioning logic adjusting speed heading and lateral position.
LiDAR mapping of slices while moving while building a 3D map of the slices, data logging

Specialised Linux projects
Experimental OS, low-level kernel development